Antes de...
Justificación pedagógica
Guía del Profesorado
Esta actividad utiliza la comunicación inalámbrica y la sensórica para la gestión de crisis en entornos de riesgo. El alumnado aprenderá a aplicar modelos estructurados de seguridad y a coordinar el trabajo en equipo mediante el uso de la tecnología.
- Qué explicar. El equipo docente explicará el Protocolo PAS (Proteger, Avisar, Socorrer) como modelo de seguridad colectiva. Se profundizará en la toma de decisiones bajo presión, la comunicación por radio y la responsabilidad profesional de cada miembro para garantizar la integridad del grupo.
- Qué hacer. El docente guiará la creación de un sistema de enlace entre robots Maqueen. Supervisará la programación del sensor de inclinación para detectar vuelcos y el uso de la radio de micro:bit para emitir alertas de parada inmediata. El profesorado coordinará un simulacro donde el alumnado aplique el protocolo PAS para asegurar la zona y socorrer al rover afectado de forma coordinada.
- Vinculación curricular. Se asocia con los saberes de cuarto de ESO sobre estrategias de trabajo en equipo (B.3.1) y habilidades comunicativas asertivas (B.3.2). Asimismo, se vincula con los procesos de toma de decisiones (C.1.5) y el compromiso ante situaciones de riesgo mediante la participación social activa (B.4.6).
- Vínculo narrativo. La seguridad del convoy depende de nuestra conexión. Un rover aislado es vulnerable, pero un convoy comunicado es invencible. Debemos garantizar que cada especialista sea capaz de detectar un accidente y activar el protocolo de rescate al instante para salvar la misión.
Objetivo
El objetivo principal es que el alumnado desarrolle un sistema de comunicación por radio entre rovers que permite coordinar una respuesta inmediata ante un accidente en el convoy. Si un transporte vuelca y bloquea la vía, el sensor de inclinación detecta automáticamente la incidencia y activa el protocolo PAS (Proteger, Avisar y Socorrer), deteniendo al resto de vehículos para evitar nuevos riesgos y garantizar una actuación segura y eficaz orientada a salvar vidas.
Finalmente, mediante la aplicación del protocolo PAS, el alumnado coordinará la parada y asistencia del convoy. Lograrán así demostrar su madurez profesional y su capacidad para tomar decisiones críticas que preserven la integridad de la flota y logren nuestra misión.
Conocimientos previos Micro:bit y MakeCode
En esta sección encontramos todos los conocimientos necesarios para poder trabajar con Micro:bit y MakeCode:
Presentación sobre el entorno Makecode y la placa Micro:bit.
Vídeo sobre el funcionamiento y primeros pasos con la placa Micro:bit.
Prácticas para familiarizarnos con entorno Makecode y la placa Micro:bit.
Comencemos con los conocimientos necesarios para poder trabajar con Micro:bit y MakeCode.
Para ver a pantalla completa clicamos en presentación
Video que nos muestra el funcionamiento y primeros pasos con Micro:bit:
Ya estamos listos para conocer el Kit IoT
Para ver a pantalla completa clicamos en presentación
Conocimiento previos de Maqueen plus v2
Ahora veremos lo que necesitamos saber de Maqueen plus v2:
- Presentación Maqueen plus v2
- Video sobre el funcionamiento de los componentes del kit
- Presentación con diferentes prácticas que nos ayudarán a entender las aplicaciones de este Kit.
¿Qué necesitas preparar?
Antes de la sesión de infiltración es conveniente:
- Mostrar al alumnado el kit Maqueen Plus V2 y la placa micro:bit. Explicar cómo sus sensores actúan como ojos y sus motores como piernas en nuestra misión de sigilo.
- Mostrar al alumnado la interfaz de MakeCode. De esta forma, en el acompañamiento podremos centrarnos en cómo programar los bloques de "Si... entonces" para la evasión de muros.
Además, necesitarás este material:
- Un portátil por cada equipo de agentes (máximo 3) con conexión a internet.
- Documentos:
-
- Diario de aprendizaje (será necesario uno por grupo de alumnos o como especifique el docente)
- Documentos para el docente
Desarrollo de la actividad
- Desarrollamos los pasos que deberá seguir el alumnado para poder realizar con éxito la misión.
- Acceso a Makecode: A través de la web Makecode. También es posible descargar la aplicación desde la web oficial para trabajar sin conexión a internet.
Paso 1. Preparando el entorno (Instalación)
Antes de empezar, necesitamos enseñar a MakeCode cómo "hablar" con el robot Maqueen.
- Entrar en MakeCode para micro:bit.
- Hacer clic en la rueda dentada o en el menú "Extensiones"
- En el buscador, escribir: Maqueen plus v20.
- Seleccionar la extensión oficial (suele ser de DFRobot).
- Resultado. Aparecerá un nuevo menú de bloques (generalmente de color verde o rojo) con las funciones específicas del robot (Motores, LEDs, Sensor de línea, etc.).
Paso 2. Creación y gestión de variables del proyecto
Para que el programa pueda almacenar, recordar y procesar la información mencionada anteriormente, debemos crear estos "contenedores" de datos siguiendo este procedimiento general:
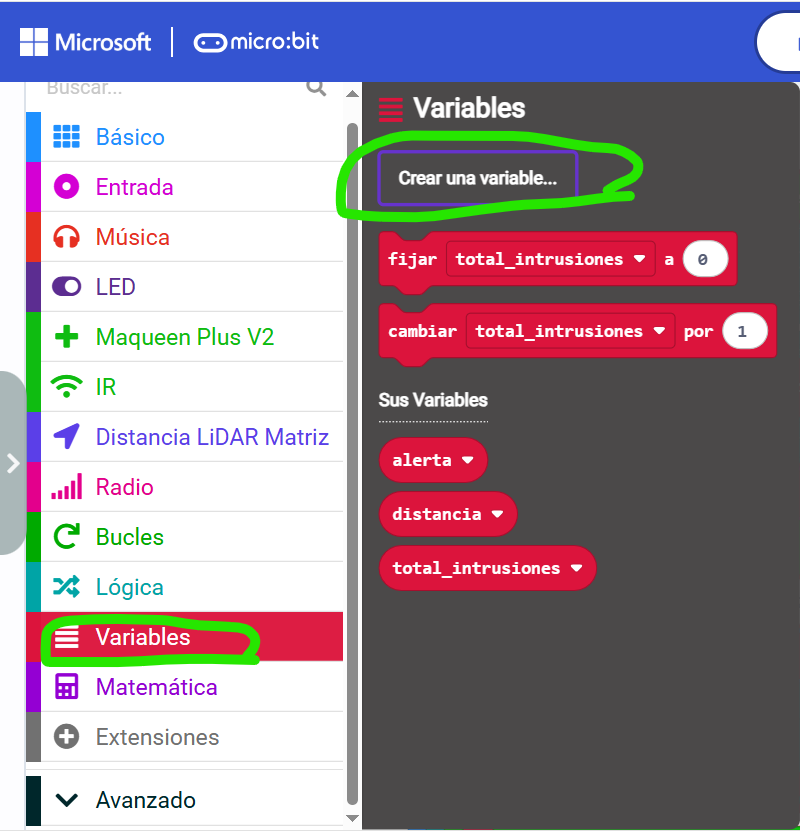
- Definición de nuevas variables. Accede a la categoría Variables (color rojo) situada en el menú lateral de bloques y pulsa el botón "Crear una variable..." que aparece en la parte superior del panel.
- Asignar nombre y disponibilidad. En la ventana emergente, escribe el nombre identificativo que represente el dato que deseas guardar (como "marcha”) y pulsa Aceptar. Este proceso se debe repetir para cada dato diferente que necesites guardar; una vez creadas, MakeCode generará automáticamente los bloques ovalados con sus nombres y los bloques de "fijar" y "cambiar" específicos para gestionarlas en tu código.

Paso 3. Inicialización del programa y configuración de hardware
Este paso establece los parámetros de comunicación y el estado inicial del robot al encenderse.
- Sincronización de red. Al detectar el evento "al iniciar", el programa ejecuta "radio establecer grupo 103", asegurando que el robot solo responda a los mandos configurados en esa misma frecuencia. Fijaremos la marcha en falso para que el robot no avance.

- Arranque de componentes. El sistema ejecuta "inicializar el Maqueen" y el programa muestra un icono que tú elijas en la matriz LED para indicar que está listo para operar.

Paso 4. Gestión de la comunicación remota y control manual
El robot puede ser controlado a distancia mediante señales de radio o mediante los botones físicos de la placa.
- Recepción de órdenes. Al detectar el bloque "al recibir radio" del menú correspondiente, el sistema evalúa una estructura condicional: si el número recibido es 1, el programa marca la variable marcha como falsa y muestra una cruz; si el número es 2, ejecuta "fijar marcha a verdadero" y muestra un icono de sonrisa para indicar que puede reanudar la marcha.

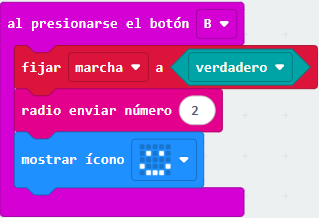
- Activación manual. Al presionarse el botón B, el sistema fija marcha a verdadero envía por radio el número 2 a otras placas para que se pongan en funcionamieto y muestra un icono alegre de reanudación de la marcha.
Paso 5. Desarrollo de la lógica principal y control por gestos
El programa utiliza un bucle "para siempre" para vigilar constantemente la orientación del robot y decidir si debe avanzar.

- Vigilancia del estado. El sistema solo procesa el movimiento si se cumple que marcha sea verdadero. Esto hace que el robot siga hacia delante. Si la distancia entre los pines es menor que 20 cm, hará un giro hacia la izquierda durante 500 milisegundos.

- Detección de vuelco. El código evalúa una estructura condicional basada en el sensor de aceleración en el menú Entrada; si detecta el gesto "logotipo hacia abajo" (el robot está inclinado o volcado), ordena "detener dos motores", fija la marcha a falso, además, envía una señal gráfica, icono de aspas, y una sonora del menú Música para que todos los rover se detengan.

En este enlace podemos encontrar el resultado de la actividad al completo.
Comenzamos - Cooperantes de FOPP
¡Infiltración inminente, escuadrón de inteligencia cinética!
Estamos a punto de entrar en las rutas inestables del sector afectado. En este terreno, el riesgo de vuelco es real y un solo rover accidentado puede detener toda nuestra operación de rescate si no actuamos como una unidad. Nuestra responsabilidad profesional es garantizar que nadie se quede atrás.

Nuestra misión: Para asegurar que el convoy viaje de forma segura, fabricaremos un dispositivo de comunicación de emergencia. Programaremos el sensor de inclinación de nuestros rovers Maqueen para que, en caso de vuelco, emitan automáticamente un mensaje de socorro por radio a todos los demás vehículos. Una vez establecida la conexión, realizaremos un simulacro de crisis: deberéis usar la comunicación para informar del peligro y aplicar el Protocolo PAS (Proteger, Avisar y Socorrer) para detener el convoy y asegurar el perímetro sin perder la calma.
Aprenderemos a dominar el Protocolo PAS como la herramienta definitiva para salvar vidas. Entenderemos cómo los datos de los sensores nos permiten tomar decisiones rápidas bajo presión. Utilizaremos nuestras habilidades sociales para trabajar coordinados en una emergencia y descubriremos que la tecnología, unida a nuestra ética profesional, es la clave para lograr nuestra misión.
Visualizamos el vídeo.
Aquí tenemos un vídeo que nos ayudará con los pasos que debemos de seguir.
Lectura facilitada
¡Atención, equipo de inteligencia!
Estamos a punto de entrar en la base enemiga. Hay láseres y alarmas muy rápidas que pueden detectarnos en un segundo.
🏃 ¿Cuál es nuestro reto?
Nuestro robot Maqueen debe ser tan ágil como un atleta de élite. No podemos manejarlo nosotros; el robot debe tener sus propios reflejos para esquivar peligros rápidamente.
🧠 El Protocolo de Defensa
Vamos a programar el cerebro del robot para que tenga "conciencia del espacio". El objetivo es muy difícil:
- Distancia crítica. El robot debe detectar un muro cuando esté muy cerca, ¡a solo 5 centímetros!
- Maniobra de evasión. En cuanto vea el muro a esa distancia, debe frenar y girar de golpe para no chocar.
🧪 Entrenamiento y Calibración
Un buen agente no deja nada al azar, ¡entrena hasta que sale perfecto!
- Simulacro. Pondremos muros por sorpresa en el circuito de pruebas.
- Evaluación. Veremos si el robot se mueve con fluidez o si choca.
- Informe. Anotaremos cada movimiento en nuestra base de datos para mejorar el programa.
Recuerda. En la academia Stealth, ser rápidos es nuestra mejor defensa.
¡Preparaos para el despliegue! ¡La misión comienza ya!
Nos preparamos
Aquí recordamos cómo funcionaba Makecode y Micro:bit. Revisaremos la práctica de conexión para entender cómo interactúa la placa con el chasis del robot. Especialmente importante revisar la categoría de "Bucles" (loops) para no repetir código innecesariamente.
Para ver a pantalla completa clicamos en presentación
Aquí recordamos cómo funciona la extensión Maqueen.
Para ver a pantalla completa clicamos en presentación
Reto de la misión
Fase 0. Configuración del ecosistema de comunicaciones
Antes de programar la lógica de seguridad, abrimos un nuevo proyecto en Makecode, habilitamos las herramientas que permiten a la micro:bit gestionar el hardware del robot y comunicarse con otros terminales. Accedemos al listado de categorías en MakeCode y pulsamos en el botón Extensiones para instalar el paquete oficial de Maqueen.
- Nuestro reto. Equipar a los rovers con la capacidad de interactuar con el entorno y recibir órdenes inalámbricas de otros ingenieros.
- Pista de investigación. Buscamos la extensión tecleando en el buscador de extensiones "Maqueen plus v20" (DFRobot) y verificamos que aparezcan las categorías de bloques para motores, radio y sensores de movimiento.
- Comprobación/visualización. Observamos que en la barra lateral disponemos ahora de todas las funciones necesarias para sincronizar la red inalámbrica de la flota.
Fase 1. Configuración inicial y de red (al iniciar)
Preparamos el ecosistema estableciendo las variables de control, la comunicación y el hardware base para evitar arranques accidentales.
- Nuestro reto. Inicializar el robot Maqueen, establecer el canal de radio en el grupo 103 y definir el estado inicial del rover como inmovilizado.
- Pista de investigación. Dentro del bloque de al iniciar, ¿cómo aseguramos que el robot arranque detenido y en la frecuencia correcta? Crea una variable llamada "marcha", fíjala a falso, establece el grupo de radio en 103, inicializa el Maqueen y muestra el icono que tú elijas para comenzar.
- Comprobación / visualización. Comprobamos que, al encender la placa, el robot muestra el icono elegido en su pantalla, indicando que está configurado y a la espera de órdenes, sin mover sus motores.
Fase 2. Control de marcha y evasión básica (para siempre)
Programamos el movimiento del rover condicionado a la variable de estado e incorporamos un comportamiento preventivo ante obstáculos cercanos.
- Nuestro reto. Condicionar el avance continuo del rover a la variable de estado y programar una maniobra evasiva si detecta un obstáculo de frente.
- Pista de investigación. Utilizamos un bucle continuo del menú Básico, para siempre, y un condicional en el menú de Lógica. Si la variable marcha es verdadera, activa ambos motores hacia adelante a velocidad 40. Además, ¿qué sensor nos ayuda a no chocar? Anidamos otro condicional, Si la distancia en cm es menor a 20, detén el motor izquierdo y haz una pausa de 500 ms para esquivarlo. Si no, detener ambos motores.
- Comprobación / visualización. Observamos que el rover avanza de forma constante solo cuando la marcha está activa y que realiza un pequeño giro para evadir obstáculos a menos de 20 cm.
Fase 3. Detección del accidente y alerta (Proteger y Avisar)
Implementamos el sistema de seguridad que detecta el vuelco del vehículo, bloqueando internamente el sistema y emitiendo el código numérico de emergencia.
- Nuestro reto. Programar una alerta automática que detenga los motores, cambie el estado de la variable, emita el código de emergencia "103" por radio y avise de forma sonora y visual al volcar.
- Pista de investigación. Dentro del bloque condicional de avance (marcha = verdadero), ¿cómo detecta la placa que se ha volcado? Si percibe el gesto logotipo hacia abajo, detenemos los dos motores, fijamos la variable "marcha" a falso, usa radio enviar número 1, muestra el icono de una "X" y reproduce el tono Do medio por 1 pulso del menú Música.
- Comprobación / visualización. Percibimos que, al poner el rover boca abajo, este frena en seco, emite un pitido, muestra la cruz en pantalla e invisiblemente envía el número de emergencia por radio.
Fase 4. Reacción del convoy por radio (al recibir radio)
Configuramos la flota para que interprete las instrucciones numéricas emitidas, deteniéndose ante emergencias o reanudando la misión.
- Nuestro reto. Programar el receptor de radio para que bloquee el movimiento del rover al recibir el código de parada y lo reactive al recibir el código de desbloqueo.
- Pista de investigación. ¿Qué evento necesitamos para interpretar las señales entrantes? En el bloque al recibir radio (recibirNúmero), usa condicionales: si el número recibido es 1, fija marcha a falso y muestra una "X". Si no, si el número recibido es 2, fija marcha a verdadero y muestra icono de carita feliz.
- Comprobación / visualización. Observamos que los rovers reaccionan de forma instantánea a las señales numéricas, deteniéndose (aspas) o avanzando (carita feliz) en función del código que capta su antena.
Fase 5. Desbloqueo manual y reactivación (al presionarse el botón B)
Añadimos un control manual para que un operador o ingeniero en pista pueda reiniciar la marcha de todo el convoy una vez resuelto el incidente.
- Nuestro reto. Implementar un comando físico que reactive el movimiento local del rover y simultáneamente mande la orden de reanudación al resto de la flota.
- Pista de investigación. ¿Qué evento físico de la placa nos permite dar la orden de salida? Al presionar el botón B, fija la variable marcha a verdadero, usa radio enviar número 2 y muestra el icono de la carita feliz.
- Comprobación / visualización. Comprobamos que al pulsar el botón B de cualquier rover, este sale de su bloqueo, enciende su carita feliz y reactiva la marcha de todo el convoy enviando el número 2.
Nuestras Herramientas de Apoyo
- Consejo de programación. El uso de la variable lógica (booleana) marcha es la clave de todo este código; actúa como un interruptor maestro. Toda la lógica de movimiento y evasión dentro del bloque "para siempre" depende estrictamente de que este interruptor esté en verdadero.
- Consejo de seguridad. Utilizar códigos numéricos simples (1 para detener, 2 para reanudar) en lugar de cadenas de texto es una excelente práctica para evitar errores tipográficos en MakeCode y hacer que el procesamiento de la información sea más ligero y rápido.
Nuestra Autocomprobación
- ¿Tenemos preparado el rover a tope de carga y con su sensor ultrasónico correcrtamente conectado?
- ¿Está la variable marcha inicializada en falso en el bloque "al iniciar" para garantizar que el robot no salga disparado al conectarle la batería?
- ¿Coinciden exactamente los números que enviamos (1 para caída, 2 para botón B) con las condiciones que hemos programado en el bloque receptor de radio?
- ¿El gesto de vuelco (logotipo hacia abajo) logra detener la marcha, cambiar el estado de la variable y avisar acústica y visulamente tal y como refleja nuestro protocolo PAS?
Un poco de ayuda
Montamos nuestro código
En este apartado podemos acceder al código necesario pero desmontado, nosotros tendremos que ensamblarlos de la forma adecuada.
¡Buena suerte!
Aprendo, pienso y crezco
Aprendo , pienso y crezco
El diario de aprendizaje es nuestra Memoria Corporativa de la Misión. No es un cuaderno para copiar teoría, sino un espacio para reflexionar sobre cómo hemos trabajado en equipo, cómo hemos diseñado nuestras soluciones y cómo hemos superado los retos técnicos de Tech-Aid Global.
- Diario de aprendizaje (será necesario uno por grupo de alumnos o como especifique el docente)
Después de...
¡Equipos de Tech-Aid Global!
Una vez que nuestra flota de rovers ha completado el despliegue logístico en la zona del desastre, procedemos a realizar la Validación Técnica final. Llegó el momento de auditar nuestro rendimiento frente a la Junta Directiva de la ONG para comprobar si nuestra intervención ha sido viable, precisa y totalmente segura para la misión de rescate.
Organización de los escuadrones
- Departamento de Logística y Matemáticas. Presentaremos la evaluación real de nuestros vehículos de transporte. Expondremos la estadística recogida sobre los tiempos del Maqueen en la ruta, usando la nube de puntos y la correlación entre velocidad y tiempo para hallar la configuración más rápida sin perder seguridad.
- Departamento de Prevención y Seguridad (FOPP). Evaluaremos la capacidad de respuesta que hemos demostrado bajo presión. Analizaremos cómo reaccionó nuestro equipo aplicando el protocolo Proteger, Avisar y Socorrer en tiempo real al detectar el vuelco de un rover, y propondremos ajustes para mejorar la gestión de crisis.
1. Roles del equipo
Para la exposición, dividiremos el trabajo en tres funciones estratégicas para garantizar la participación de todo nuestro equipo:
- La portavocía. Explicaremos la urgencia de nuestra misión logística contra reloj, justificando cómo el trabajo cooperativo y la comunicación asertiva garantizan la integridad del convoy en la montaña.
- La parte técnica. Haremos la demostración en vivo de la solución, enseñando cómo el rover recorre la ruta y cómo los sensores de inclinación junto a la radio logran detener al grupo si hay un accidente.
- El análisis. Expondremos los datos de nuestra telemetría, detallando el sistema de inecuaciones para la velocidad segura y la optimización matemática que nos permite llegar en el menor tiempo posible.
2. Objetivo y programación (¿qué y por qué?)
Explicaremos la lógica de nuestro código y su utilidad vital para el éxito de la ayuda humanitaria:
- El objetivo. Buscamos dar con los valores de velocidad óptimos para que los rovers lleguen a las zonas afectadas muy rápido, estableciendo además una red de alerta por radio que detenga la marcha si alguien vuelca.
- Las instrucciones (Entradas y Salidas). Detallaremos cómo hemos ajustado los giros en el código siguelíneas y cómo programamos el envío de mensajes de emergencia que se disparan con el sensor de inclinación.
3. Diario de errores y soluciones
Documentaremos las dificultades que superamos durante los ensayos en nuestro terreno de pruebas:
- Fallos técnicos. Reflexionaremos sobre los problemas vividos: ¿pusimos una velocidad excesiva y el robot abandonó el arco de circunferencia? ¿fallaron los mensajes de radio dificultando la toma de decisiones en plena crisis?
- Solución. Explicaremos cómo recalibramos los límites de velocidad por ensayo y error para no penalizar el tiempo de la ruta, y cómo reescribimos el código de transmisión para que la alerta funcionara sin demoras.
4. Comprobación y conclusiones
Analizaremos si esta solución es apta para usarla en una emergencia de la vida real:
- Contraste. Evaluaremos el comportamiento de nuestra flota al simular un vuelco real, verificando si la alerta de inclinación llega a tiempo a los demás vehículos para parar el convoy de inmediato.
- Conclusión. Valoraremos si por fin hemos hallado el punto óptimo entre rapidez y control. Reflexionaremos sobre por qué la precisión matemática y los protocolos preventivos marcan el éxito de un rescate humanitario.
5. Formato de presentación
Elegiremos la opción que mejor demuestre nuestra competencia como rescatistas de élite:
- Opción A. Demo en vivo. Haremos una prueba real en el circuito del aula. Forzaremos manualmente el accidente de un vehículo y demostraremos cómo la radio coordina la parada de toda la flota.
- Opción B. Mapa del algoritmo. Proyectaremos la programación para explicar el flujo de decisiones: cómo evalúa las condiciones de inclinación y el sistema de inecuaciones que controla el movimiento seguro.
- Opción C. Registro de datos. Mostraremos nuestra hoja de telemetría y una gráfica de regresión, comparando la velocidad de giro con los tiempos logrados para justificar por qué nuestra configuración es fiable.