Antes de...
Justificación pedagógica
Esta actividad utiliza la modelización algebraica y las funciones para garantizar la precisión en misiones de auxilio.
- Qué explicar. El equipo docente explicará el concepto de relación funcional entre dos variables. Se abordará la representación gráfica de datos empíricos mediante la construcción de una nube de puntos (diagrama de dispersión). Además, se trabajará la interpretación de la curva de tendencia, permitiendo al alumnado diferenciar analítica y visualmente cuándo un conjunto de datos sigue un modelo lineal y cuándo se ajusta a un modelo cuadrático.
- Qué hacer. El docente guiará la programación del robot Maqueen con Micro:bit para medir tiempos de desplazamiento en tramos de control. Cada docente supervisará el cálculo de la velocidad y el despeje del tiempo exacto necesario para recorrer 15 cm y 40 cm. Se validará finalmente que la flota ejecute la ruta de entrega médica con precisión milimétrica.
- Vinculación curricular. Se vincula con los saberes de cuarto de ESO sobre la modelización mediante lenguaje algebraico (D.2.4.1) y la búsqueda de soluciones en ecuaciones lineales (D.4.4.2 y D.4.4.3). Asimismo. se asocia con el análisis de funciones lineales (D.5.4.1 y D.5.4.2). con la proporcionalidad directa (A.5.4.1) y con el uso de algoritmos (D.6.4.1 y D.6.4.2).
- Vínculo narrativo. Ante la emergencia de una población aislada en puntos de difícil acceso. la precisión es vital para entregar suministros médicos. Calibraremos los rovers para que sin importar el terreno o la carga recorran distancias idénticas y garanticen que la ayuda llegue con éxito.
Objetivo
El objetivo principal es que el alumnado programe y calibre un robot Maqueen para realizar entregas de suministros médicos siguiendo una ruta exacta. Ayudará al equipo de rescate a superar las variaciones del terreno mediante cálculos matemáticos de precisión.
Para lograrlo, cada estudiante diseñará un modelo funcional que asocie de forma lógica el movimiento del rover con la velocidad real medida en tramos de control. Supervisando el despeje de incógnitas para automatizar el tiempo de motor necesario en cada maniobra de avance.
Finalmente, mediante el uso de bloques de código y la proporcionalidad directa. Configurarán los botones del dispositivo para ejecutar desplazamientos de 15 cm y 40 cm. Lograrán que la flota de rescate sea totalmente precisa y cumpla con la ruta de suministros médicos sin desviaciones.
Conocimientos previos micro:bit y Make Code
En esta sección encontramos todos los conocimientos necesarios para poder trabajar con Micro:bit y MakeCode:
Presentación sobre el entorno Makecode y la placa Micro:bit.
Vídeo sobre el funcionamiento y primeros pasos con la placa Micro:bit.
Prácticas para familiarizarnos con entorno Makecode y la placa Micro:bit..
Comencemos con los conocimientos necesarios para poder trabajar con Micro:bit y MakeCode.
Para ver a pantalla completa clicamos en presentación
Video que nos muestras el funcionamiento y primeros pasos con Micro:bit:
Para ver a pantalla completa clicamos en presentación
Conocimiento previos de Maqueen plus v2
Ahora veremos lo que necesitamos saber de Maqueen plus v2:
- Presentación Maqueen plus v2.
- Vídeo sobre el funcionamiento de los componentes del kit.
- Presentación con diferentes prácticas que nos ayudarán a entender las aplicaciones de este Kit.
¿Qué necesitas preparar?
Antes de la sesión de acompañamiento es conveniente.
- Presentar el REA al alumnado.
- Mostrar al alumnado el dispositivo Maqueen v2, su funcionalidad y uso.
- Mostrar al alumnado la interfaz de Makecode. De esta forma, en el acompañamiento podremos centrarnos en cómo programar por bloques y la sesión será más ágil.
Además, necesitarás este material.
- Un portátil por cada dos alumnos/as (máximo 3) con conexión a internet.
- Documentos:
- Documento para el alumno (será necesario uno por pareja o como especifique el/la docente).
- Diario de aprendizaje (será necesario uno por pareja o como especifique el/la docente):
Desarrollo de la actividad
- Cálculo de la Velocidad (v): Los alumnos programan el robot para avanzar durante 1 segundo (1000 milisegundos) y miden la distancia recorrida. Ese dato será su constante de velocidad.
- Aplicación de la Fórmula: Para la distancia objetivo marcada en el aula, aplican la fórmula t = d / v.
- Conversión a milisegundos: El resultado del tiempo debe convertirse a milisegundos para introducirlo en el bloque de "pausa" de MakeCode.
Programación de la actividad
- Hardware requerido: micro:bit v2, Maqueen v2.
- Objetivo: Lograr que el rover se detenga al llegar a la zona de entrega situada a una distancia fija, basándose en el cálculo del tiempo de un calibrado previo.
Paso 1: Preparando el Entorno (Instalación)
Antes de empezar, necesitamos enseñar a MakeCode cómo "hablar" con el robot Maqueen.
- Entrar en MakeCode para micro:bit.
- Hacer clic en la rueda dentada o en el menú "Extensiones".

- En el buscador, escribir: Maqueen plus v2.
- Seleccionar la extensión oficial (suele ser de DFRobot).

- Resultado: Aparecerá un nuevo menú de bloques (generalmente de color verde o rojo) con las funciones específicas del robot (Motores, LEDs, Sensor de línea, etc.).

Paso 2. Creación y gestión de variables del proyecto
Para que el programa pueda almacenar, recordar y procesar la información mencionada anteriormente, debemos crear estos "contenedores" de datos siguiendo este procedimiento general:
- Definición de nuevas variables: Accede a la categoría Variables (color rojo) situada en el menú lateral de bloques y pulsa el botón "Crear una variable..." que aparece en la parte superior del panel.
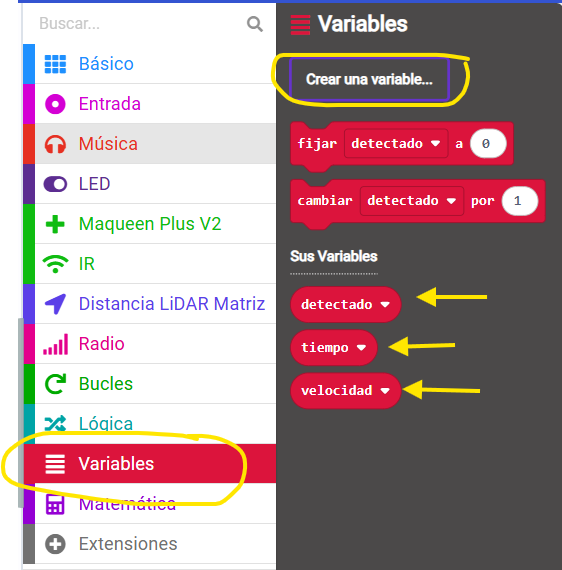
- Asignar nombre y disponibilidad: En la ventana emergente, escribe el nombre identificativo que represente el dato que deseas guardar (como "tiempo", “velocidad”, "detectado") y pulsa Aceptar. Este proceso se debe repetir para cada dato diferente que necesites guardar; una vez creadas, MakeCode generará automáticamente los bloques ovalados con sus nombres y los bloques de "fijar" y "cambiar" específicos para gestionarlas en tu código.

Paso 3. Inicialización de variables y arranque
Al arrancar el programa, crearemos las variables de control que almacenarán los datos matemáticos y pondremos el robot en marcha.
- Configuración inicial: Dentro del bloque "al iniciar", arrastra dos bloques "fijar a 0" de la categoría Variables para crear las variables velocidad y detectado, inicializándolas a cero. Añade el bloque "activar dos motores hacia adelante velocidad 50" de la categoría Maqueen Plus V2 para enviar la orden física de movimiento constante desde el inicio.

Paso 4. Cronómetro interno
Vamos a crear un temporizador que se ejecute en segundo plano para contar el tiempo que tarda el robot en recorrer una distancia específica.
- Bucle "cada 100 ms": Arrastra el bloque "cada 100 ms" de la categoría Bucles para crear un evento cíclico. Introduce dentro el bloque "cambiar tiempo por 100" de la categoría Variables para que este contenedor sume milisegundos constantemente, actuando como un cronómetro de precisión.

Paso 5. Inicio de la medición de tiempo
Configuraremos el bucle principal para que el robot sepa cuándo empezar a contar el tiempo al acercarse a un obstáculo (punto de inicio).
- Inicio del cronómetro: Introduce un bloque "para siempre" y coloca dentro un condicional "si detectado = 0 entonces" de la categoría Lógica.
- Detección del punto de inicio: Dentro de ese "si", añade un nuevo condicional evaluando si "distancia en cm (pines TRIG P13 / ECHO P14) <= 30" entonces. Inserta los bloques "fijar detectado a 1" para cambiar de fase y "fijar tiempo a 0" para resetear el cronómetro justo en ese punto exacto del espacio.

Paso 6. Cálculo matemático de la velocidad
El robot seguirá avanzando hasta llegar a un segundo punto más cercano al obstáculo, donde se detendrá y calculará matemáticamente su propia velocidad real.
- Detención y cálculo: Debajo del condicional anterior, pero dentro del bloque "para siempre", añade otro "si detectado = 1 entonces". En su interior, coloca un condicional evaluando si "distancia en cm (pines TRIG P13 / ECHO P14) < 5" entonces.
- Velocidad real del chasis: Añade "fijar detectado a 2" para finalizar el proceso de medición, seguido de "detener dos motores" para frenar el robot. Introduce "fijar velocidad a" y acóplale la operación de división 25 / tiempo usando las categorías Variables y Matemática, lo que guardará el cálculo de la velocidad real a la que se ha movido el chasis.

Paso 7. Desplazamiento exacto con el Botón A
Ahora usaremos la velocidad calculada por el propio robot para decirle que avance una distancia exacta (15 cm) calculando el tiempo que debe mantener los motores encendidos.
- Prueba de 15 cm (Botón A): Arrastra el evento "al presionarse el botón A" de la categoría Entrada. Coloca "mostrar cadena '15 cm'", seguido de "activar dos motores hacia adelante velocidad 50". Inserta el bloque "pausa (ms)" y encájale la operación matemática 15 / velocidad para que la placa calcule exactamente cuánto tiempo debe esperar antes de ejecutar la siguiente orden. Añade "detener dos motores" para frenar el robot exactamente a los 15 cm.

Paso 8. Desplazamiento exacto con el Botón B
Replicaremos la lógica anterior para que el robot sea capaz de recorrer una distancia diferente de forma autónoma usando los mismos cálculos dinámicos.
- Prueba de 40 cm (Botón B): Arrastra el evento "al presionarse el botón B" de la categoría Entrada. Coloca "mostrar cadena '40 cm'", seguido de "activar dos motores hacia adelante velocidad 50". Inserta el bloque "pausa (ms)" y encájale la operación matemática 40 / velocidad (distancia deseada dividida entre la velocidad conocida). Termina con "detener dos motores" para asegurar la precisión del movimiento calculado.

En este enlace podemos encontrar el resultado de la actividad al completo.
Comenzamos - Cooperantes de Matemáticas A
¡Atención, cooperantes de Logística Matemática!
Nuestra misión de rescate entra en una fase crítica. Debemos entregar suministros médicos vitales en puntos de muy difícil acceso. El éxito de la operación depende de la precisión de nuestros vehículos terrestres.

Nuestro objetivo logístico es que el vehículo de suministros sea capaz de frenar por sí solo y de forma exacta dentro de una zona segura de entrega de 20x20 cm, sin importar a qué distancia se encuentre inicialmente. Para ello, no usaremos el azar, sino las matemáticas y la programación. De esta forma conseguiremos saber la distancia exacta que recorrerá nuestro rover para llegar al punto de entrega.
Aplicaremos las funciones lineales y el despeje de incógnitas en la fórmula de velocidad. Utilizaremos el pensamiento algorítmico para programar motores con precisión introduciendo variables matemáticas en nuestro código de Micro:bit. Descubriremos cómo esta modelización matemática permite que nuestra tecnología calcule distancias en tiempo real y responda con exactitud en situaciones de emergencia para lograr nuestra misión logística.
Visualizamos el vídeo
Aquí tenemos un vídeo que nos ayudará con los pasos que debemos de seguir.
Lectura facilitada
🚑 Nuestra misión. Rescate y entrega de medicinas
Tenemos que entregar suministros médicos en lugares muy difíciles de alcanzar. El éxito depende de que nuestro vehículo sea capaz de frenar solo y de forma exacta en una zona de entrega pequeña (un cuadrado de 20x20 centímetros).
🔍 ¿Qué debemos calcular?
Para que el vehículo no se pase de largo y llegue al punto exacto, necesitamos usar las matemáticas:
- Funciones lineales. Son fórmulas que nos ayudan a saber qué distancia recorre el coche según su velocidad y el tiempo.
- Despeje de incógnitas. Es hacer cálculos para encontrar el dato que nos falta y saber cuándo debe parar el motor.
- Variables. Son los números que metemos en el código para que el robot se adapte a cualquier distancia.
📝 Pasos a seguir:
- Aplicar la fórmula de la velocidad. Calcular la distancia exacta que recorrerá el rover hasta el punto de entrega.
- Programar la Micro:bit. Meter los datos matemáticos en el código para que los motores se muevan con total precisión.
- Configurar el frenado automático. Programar el sistema para que el vehículo se detenga solo dentro de la zona segura.
- Probar el cálculo en tiempo real. Comprobar que el rover responde bien en emergencias, sin importar si empieza el camino más lejos o más cerca.
📋 Logística de emergencia
Es muy importante usar el pensamiento algorítmico para que la tecnología tome decisiones correctas. Así, gracias a las matemáticas, salvaremos vidas entregando los suministros médicos en el sitio exacto.
Nos preparamos
Aquí comprobamos cómo funciona Makecode y micro:bit. Revisaremos la práctica de conexión para entender cómo interactúa la placa con el chasis del robot. Especialmente importante revisar la categoría de "Bucles" (loops) para no repetir código innecesariamente.
Para ver a pantalla completa clicamos en presentación
Aquí vemos cómo funciona la extensión Maqueen.
Para ver a pantalla completa clicamos en presentación
Aquí tenemos un documento que nos ayudara a realizar la actividad:
Reto de la misión
Aquí tenemos las instrucciones y pistas para realizar la actividad.
Fase 0. Preparando nuestro rover logístico
Somos los cooperantes de Matemáticas en el Departamento de Logística y Seguridad de la ONG Tech-Aid. Nuestra misión es preparar el entorno digital para que nuestro vehículo transporte suministros médicos a pueblos aislados. Vamos a programarlo para que mida distancias mediante fórmulas matemáticas y entregue su carga en el punto exacto.
- Nuestro reto. Añadir la extensión oficial de nuestro robot Maqueen Plus V2 para desbloquear sus bloques de movimiento y funciones de navegación.
- Pista de investigación. Accedemos MakeCode y buscamos en el menú con forma de rueda dentada o en la sección de extensiones el nombre de nuestro rover para cargar sus herramientas logísticas.
- Comprobación/visualización. Observamos que aparece un nuevo menú de bloques, normalmente de un color verde llamativo, lleno de funciones específicas listas para usarse.
Fase 1. Creando la memoria de a bordo e iniciando la marcha
Para poder calcular rutas logísticas y velocidades, el rover necesita tener una "libreta de apuntes" en su cerebro electrónico. Vamos a crear esos espacios de memoria y a darle la primera orden de arranque constante.
- Nuestro reto. Crear las variables matemáticas necesarias, establecer su valor inicial a cero y arrancar los motores a una potencia de 50.
- Pista de investigación. Exploramos la categoría Variables para crear los nuevos contenedores de información y nombrarlos "velocidad", "detectado" y "tiempo". Luego, para que este reseteo comience automáticamente al encender la placa, investigamos qué bloque de la categoría Básico aloja estas instrucciones iniciales. ¿Cómo unimos esto con los bloques de la extensión de Maqueen para que ambos motores avancen juntos al arrancar la misión?
- Comprobación/visualización. Comprobamos que, al iniciar la placa, las variables se inicializan completamente limpias y el robot comienza a desplazarse automáticamente por la pista.
Fase 2. Diseñando el cronómetro interno
Necesitamos medir cuánto tarda nuestro vehículo en recorrer un tramo concreto de la ruta. Para ello, programaremos un reloj interno oculto que cuente las fracciones de segundo de forma ininterrumpida sin detener los motores.
- Nuestro reto. Configurar un evento cíclico independiente que sume 100 unidades a nuestra variable de tiempo cada 100 milisegundos.
- Pista de investigación. ¿Qué bloque con forma de evento nos permite ejecutar acciones en un ciclo repetitivo cada cierta cantidad de milisegundos? Dentro de él, investigamos en la categoría Variables cómo usar el bloque de "cambiar" para que nuestro contenedor de tiempo crezca de 100 en 100 constantemente, actuando como un cronómetro de gran precisión.
- Comprobación/visualización. Percibimos que nuestro programa es capaz de llevar la cuenta del tiempo de forma autónoma en segundo plano, sin bloquear las demás acciones de navegación.
Fase 3. Estableciendo marcas de medición en el recorrido
Nuestro rover avanza hacia un muro de prueba. Queremos que empiece a medir el tiempo exacto justo cuando cruce la primera marca de los 30 cm y calcule su velocidad real al llegar a los 5 cm.
- Nuestro reto. Programar un bucle infinito que evalúe si la distancia cruzó nuestras dos marcas mediante condicionales lógicos, reseteando el tiempo en la primera marca y frenando en la segunda para calcular matemáticamente la velocidad.
- Pista de investigación. Para que el escaneo no se detenga, usamos el bloque continuo, "Para siempre" de la categoría Básico. Dentro, exploramos la categoría Lógica para anidar múltiples condicionales que verifiquen los centímetros detectados por el sensor de ultrasonidos. Para que el robot sepa en qué paso del cálculo está, usamos nuestra variable "detectado" (que cambia de 0 a 1, y luego a 2). En la fase de frenado final, ¿cómo combinamos nuestro bloque de fijar velocidad con el operador de división de la categoría Matemáticas para dividir un valor constante (25) entre nuestra variable cambiante "tiempo"?
- Comprobación/visualización. Observamos que nuestro vehículo avanza hacia un obstáculo, empieza a cronometrar de forma invisible en un punto del espacio y frena limpiamente antes del impacto, habiendo guardado su propia velocidad matemática.
Fase 4. Programando rescates y entregas exactas de suministros
Ahora que el rover "sabe" a qué velocidad real se desliza por nuestro terreno, podemos usar la estadística y la cinemática para ordenarle que viaje distancias concretas calculando de forma dinámica su propio tiempo de viaje.
- Nuestro reto. Asignar secuencias de movimiento a dos botones físicos distintos, logrando que el tiempo de espera, en el que están en marcha los dos motores, se calcule dinámicamente dividiendo la distancia de entrega deseada (15 ó 40) entre la variable velocidad que nuestra máquina fijó (aprendió) antes.
- Pista de investigación. Investigamos en la categoría Entrada cómo detectar ambos botones tácticos de la placa (A y B). Para mostrar la información, buscamos en Básico cómo imprimir una cadena de texto en pantalla. Al usar la pausa en milisegundos de la categoría Básico, ¿cómo introducimos ahí la operación Matemáticas que divide la distancia de la entrega entre nuestra variable "velocidad", permitiendo un frenado exacto en el objetivo?
- Comprobación/visualización. Comprobamos que, al pulsar los botones, el robot calcula instantáneamente la duración de su viaje y recorre las distancias asignadas de forma precisa, deteniéndose justo en la zona de descarga.
Fase 5. Dando vida a nuestro rover
Ha llegado el momento de unir nuestro terminal logístico al rover para asegurar que los suministros alcancen la zona devastada de forma eficaz y segura.
- Nuestro reto. Transferir el código a la placa micro:bit, integrarla en el vehículo y ejecutar el despliegue de prueba sobre el terreno.
- Pista de investigación. Vinculamos la placa y descargamos la programación. Nos aseguramos que está bien insertada en la ranura correspondiente del robot, situamos el robot en la zona de salida y pulsamos el interruptor de encendido del Maqueen. Para la fase de calibración, situamos un obstáculo, marcamos una línea a 5 cm y otra a 30 cm del mismo. El robot calculará el tiempo que tarda desde que detecta el obtáculo a 30 cm hasta que se acerca a 5 cm. Después, preparamos la zona de entrega marcando una línea de salida y otras dos a 15 cm (corta distancia) y a 40 cm (larga distancia). Probamos las rutas pulsando el Botón A y el Botón B respectivamente.

- Comprobación / visualización. Verificamos que el rover avanza y frena con precisión milimétrica dentro de la zona de entrega marcada a 15 cm al pulsar el botón A, y hace exactamente lo mismo a 40 cm al pulsar el botón B.
Nuestras herramientas de apoyo
- Consejo lógico. Pensemos en las variables matemáticas como si fueran los cajones de archivo de nuestro Departamento de Logística. En el cajón "tiempo" guardamos nuestro cronómetro, en "velocidad" anotamos nuestro cálculo cinemático final, y en "detectado" usamos una etiqueta que nos dice en qué paso del experimento estamos (0, 1 o 2) para no repetir acciones innecesarias. El orden estructurado es la clave para un código impecable.
- Consejo hardware/físico. Es fundamental que entendamos que los motores no tienen una velocidad matemática absoluta universal. La velocidad real a la que avanza el rover por la pista dependerá siempre del nivel de la batería, del peso de la carga y de la fricción del suelo (madera, baldosa o alfombra de la clase). Por eso investigamos y experimentamos: al hacer que el robot calcule su propia velocidad midiendo el tiempo en nuestro escenario físico, evitamos usar valores fijos y logramos que las matemáticas se adapten a la realidad de nuestra "Operación Última Milla".
Nuestra autocomprobación
- ¿Hemos identificado correctamente qué activador inicia cada secuencia lógica? (Sí/No)
- ¿Observamos que el comportamiento coincide con el orden lógico visible en la captura? (Sí/No)
- ¿Hemos aplicado la estabilización/transformación necesaria para que cada acción cuente como una sola interacción? (Sí/No)
Un poco de ayuda
Montamos nuestro código
En este apartado podemos acceder al código necesario pero desmontado, nosotros tendremos que ensamblarlos de la forma adecuada.
¡Buena suerte!
Aprendo, pienso y crezco
Aprendo , pienso y crezco
El diario de aprendizaje es nuestra Memoria Corporativa de la Misión. No es un cuaderno para copiar teoría, sino un espacio para reflexionar sobre cómo hemos trabajado en equipo, cómo hemos diseñado nuestras soluciones y cómo hemos superado los retos técnicos de Tech-Aid Global.
- Diario de aprendizaje (será necesario uno por grupo de alumnos o como especifique el docente)
Después de...
Una vez que nuestra solución tecnológica funcione correctamente, realizaremos una Validación Técnica con el resto de la clase. Es el momento de exponer los resultados de nuestro rescate ante la Junta Directiva de la ONG para asegurar que nuestro trabajo en la montaña ha sido viable, preciso y seguro.
Organización de los equipos operativos
- Departamento de Logística (Matemáticas A). Presentaremos cómo nuestro código automatiza la calibración del rover, midiendo el tiempo que tarda en recorrer 25 cm para calcular internamente su velocidad real y lograr que avance distancias exactas de 15 cm o 40 cm.
- Departamento de Prevención y Seguridad (FOPP). Presentaremos nuestro "protocolo de la luz roja", analizando cómo programamos el siguelíneas y el sensor ultrasónico para detener el vehículo ante obstáculos, utilizando este simulador para entrenar nuestra asertividad y gestión emocional al pedir ayuda.
Roles del equipo
Para la exposición, dividiremos el trabajo en tres funciones estratégicas para que todo nuestro equipo participe:
- La portavocía. Explicaremos la urgencia de nuestra misión médica y las conclusiones obtenidas sobre cómo afrontar imprevistos en la ruta entrenando nuestra tolerancia a la frustración y la toma de decisiones.
- La parte técnica. Realizaremos la demostración en vivo de nuestro rover Maqueen, mostrando cómo automatiza el cálculo de distancias al pulsar los botones, cómo los leds de la placa muestran la distancia a recorrer y cómo frena en seco justo en la zona perimetrada.
- El análisis. Explicaremos los bloques matemáticos que resuelven la ecuación de la velocidad y la lógica del condicional detrás del sensor ultrasónico, respondiendo a las dudas sobre nuestro margen de error.
Objetivo y programación (¿qué y por qué?)
Explicaremos la lógica de nuestro trabajo y su utilidad vital para el éxito de la misión humanitaria:
- El objetivo. Buscamos asegurar que la ayuda llegue exactamente a su destino sin sufrir daños. Para ello, calibramos los motores de forma autónoma y configuramos un protocolo de seguridad que protege la carga ante cualquier riesgo en el terreno.
- Las instrucciones (Entradas y Salidas). Detallaremos cómo usamos el sensor ultrasónico (entrada) para reiniciar la variable de tiempo a los 30 cm y detener la marcha a los 5 cm, estableciendo la velocidad. Explicaremos cómo, al pulsar los botones A o B (entradas), el robot avanza distancias exactas y cómo enciende los LEDs rojos (salidas) al detectar una emergencia.
Diario de errores y soluciones
Documentaremos las dificultades que hemos superado durante las pruebas en nuestro terreno montañoso:
- Fallos técnicos. Reflexionaremos sobre problemas reales, como la inercia física que impedía al robot detenerse exactamente a los 5 cm, o errores en el código que retrasaban la activación de la luz de alerta.
- Solución. Explicaremos cómo depuramos los bloques de variables matemáticas para afinar el cálculo del motor y qué ajustes hicimos en el código del sensor ultrasónico para garantizar una frenada completamente segura.
Comprobación y conclusiones
Analizaremos si nuestra configuración robótica es válida para una situación de emergencia real en la montaña:
- Contraste. Evaluaremos el comportamiento de nuestro vehículo colocando un obstáculo sorpresa en la pista, comprobando si el protocolo preventivo frena a tiempo y si los recorridos con los botones A y B cumplen los centímetros precisos.
- Conclusión. Valoraremos nuestro margen de error físico. Reflexionaremos sobre cómo los accidentes son oportunidades para redefinir metas y cómo el cálculo matemático garantiza una respuesta exacta bajo presión.
Formato de presentación (opciones DUA)
Elegiremos el formato que mejor demuestre nuestras competencias como especialistas en logística y rescate:
- Opción A. Demo en vivo. Realizaremos una prueba real en el circuito de clase, demostrando físicamente la exactitud de los tramos de 15 cm y 40 cm, la parada de emergencia automática ante un obstáculo así como las luces rojas para avisar de la retención.
- Opción B. Mapa del Algoritmo. Proyectaremos la captura de nuestro código en MakeCode para explicar los bucles matemáticos, el manejo de la variable tiempo/velocidad y el condicional de seguridad del sensor.
- Opción C. Registro de Datos. Presentaremos la demostración matemática en la pizarra, explicando el despeje de la fórmula de velocidad y evaluando el error absoluto y relativo que sufren los motores al rodar por la montaña.